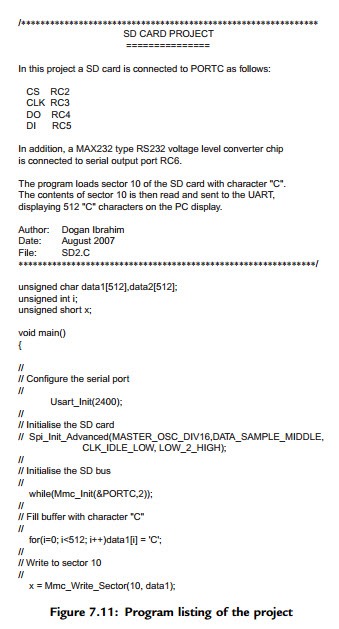
PROJECT 7.3—Using the Card Filing System The hardware of this project is the same as for Project 7.1 (i.e., as shown in Figure 7.8). In this project, a file called MYFILE55.TXT is created on the SD card. String “This is MYFILE.TXT” is written to the file initially. Then the string “This is the added data.. […]
Continue reading…
Advanced PIC18 Projects—SD Card Projects:Using the Card Filing System